Fall 2020 (or see Fall 2022)
Computational Linear Algebra is a pilot first-semester, first-year undergraduate course that will show how mathematics and computation are unified for reasoning about data and making discoveries about the world.
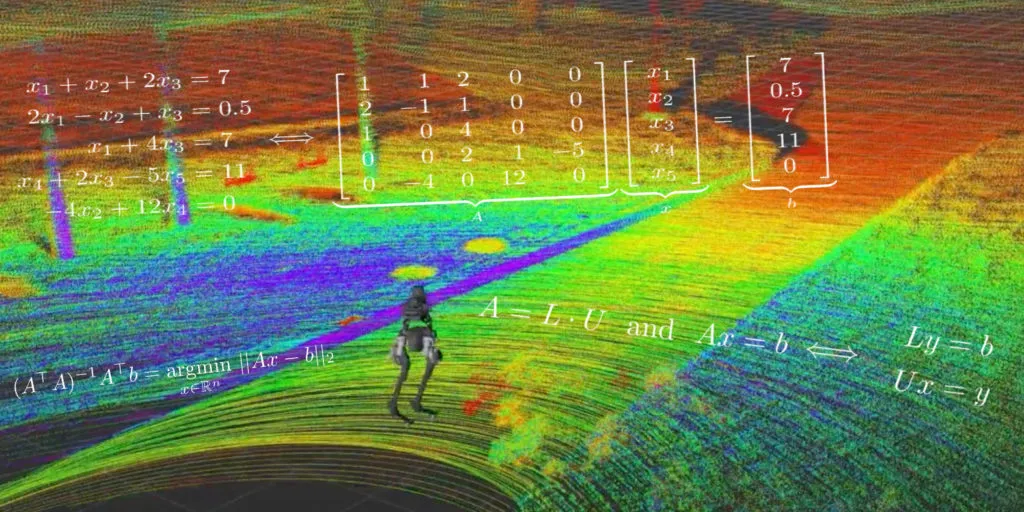
Linear algebra and coding are rapidly becoming an essential foundation for the modern engineer in a computational world. Students in this course will gain insights into the mathematical theory of linear algebra and its realization in practical computational tools.
Math is the language of engineering, but coding is believing and realizing it. The mathematical content of ROB 101 will be built around systems of linear equations, their representation as matrices, and numerical methods for their analysis. These methods will be given life through the lens of robotics and contemporary intelligent systems and their compelling applications.
The first pilot of ROB 101, including lectures and course material, is now available online.
Read more about the course development in ASEE Prism: Solving for Equity.
Credits
3 credits
Schedule
MWF 10 to 11 (also asynchronous)
Course material
Pilot semester (Fall 2020) on Github
Teaching
Professor Maani Ghaffari
Professor Jessy Grizzle
Tribhi Kathuria
Kira Biener
Content
Madhav Achar
Kira Biener
Fangtong Liu
Shaoxiong Yao
Development
Professor Chad Jenkins
What are the topics covered in this course?
- Julia as an open-source “dynamic” programming language. Quoting from Wikipedia: “Julia is a high-level, high-performance, dynamic programming language. While it is a general-purpose language and can be used to write any application, many of its features are well-suited for high-performance numerical analysis and computational science.” All of the mathematical topics treated in the course will be made operational through computational exercises in Julia.
- Small sets of linear equations, their solvability, and how to find solutions: underdetermined, overdetermined, and just right. Scaling up to large sets of equations (thousands of variables) through vectors, matrices, determinants, and matrix inverses.
- Regression as a means of building models and making predictions.
- A camera pin-hole model and camera calibration via regression.
- Concept of factoring a matrix. Inner products and orthogonal vectors. Symmetric matrices and orthogonal matrices.
- Finding solutions to nonlinear equations via gradient descent.
- Optimization as a tool for solving robot perception problems.
- Linear transformations with applications to spatial coordinates.
- LiDAR point clouds and blobs.
- Accelerometers, single-axis gyroscopes, encoders, and what is an ODE.