Michigan Robotics News

Dawn Tilbury named Distinguished University Professor
July 16, 2026
The robotics department chair was appointed the Martha E. Pollack Distinguished University Professor of Robotics, recognizing research that has reshaped manufacturing systems, networked control, autonomous vehicles, and human-robot interaction.

Robotics celebrates standout staff and faculty excellence in 2026
June 29, 2026
The department congratulates Ram Vasudevan on the Robotics Departmental Faculty Award and Samantha Price on the College of Engineering Staff Excellence Award.

Artists paint with robots to study creative expression
June 23, 2026
U-M researchers paired eight abstract artists with a robot arm over three weeks, and their feedback reveals what it’s like to co-create a painting with a robot.
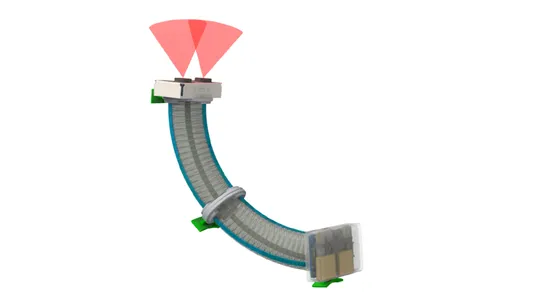
An earthworm-inspired robot to inspect complex pipelines
June 9, 2026
An untethered robot can crawl along pipelines and maneuver around sharp turns and tight junctions to detect potential defects before they lead to costly failures.

Knee exoskeletons to relieve arthritis pain, preserve mobility
June 1, 2026
Extending a motorized brace approach to take the load off arthritic knees, a U-M research team shifts from boosting strength to reducing joint contact forces.
 robotics community
robotics communityFIRST Robotics alumni help Michigan teams from Escanaba to Detroit
May 28, 2026
Michigan students who grew up in FIRST Robotics travel across the state to give back by mentoring and volunteering with teams from Detroit, the Upper Peninsula, and even Ohio.
 human-robot interaction & teaming
human-robot interaction & teamingDo robots need bodies? UMSI researchers say it depends
May 27, 2026
UMSI researchers challenge the assumption that virtual robot representations yield the same human responses as physically present robots, arguing the field should focus on when virtual alternatives are appropriate.
 manufacturing robotics
manufacturing roboticsRobots and AI to help shipbuilding stay on track
May 11, 2026
American and Japanese researchers will develop robots and AI to help shipbuilders pivot when the built ship deviates from the planned design.
 robotics community
robotics communityRobotics Outreach Ambassadors of 2026
April 29, 2026
We honor students who are enthusiastic in outreach through their extraordinary service to the robotics community and beyond.

Subscribe to the Michigan Robotics Newsletter
umrobotics.substack.com
 manufacturing robotics
manufacturing roboticsRobotics, advanced manufacturing and national security Q&A
April 27, 2026
 design & soft robotics
design & soft robotics'Spark of Color' wins soft robotics art awards
April 16, 2026
 robotics community
robotics communityFive new concentrations for undergraduate robotics major
March 17, 2026
 robot learning & foundational models
robot learning & foundational modelsChad Jenkins named ACM Fellow
March 11, 2026
 design & soft robotics
design & soft roboticsSoft microrobots to rescue plants from pests receive $1M award
February 25, 2026
 robot learning & foundational models
robot learning & foundational modelsUsing AI to improve 3D printing concrete
February 20, 2026
 design & soft robotics
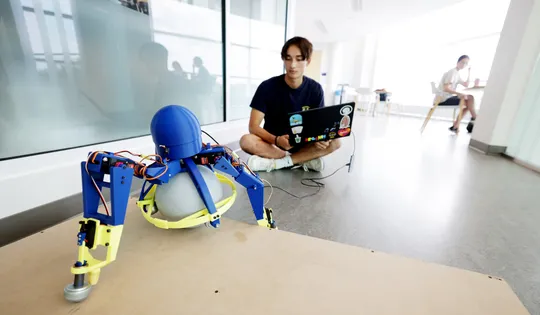
design & soft roboticsOpen-source, modular robot for understanding evolution
February 11, 2026