Michigan roboticists, many representing the new University of Michigan Robotics Department, will be presenting a total of nine papers at Robotics Science and Systems (RSS). Their research covers a wide range of topics from robot teams and trust propagation to trajectory design and motion planning. The RSS conference is held in Daegu, Korea, from July 11 to July 14.
In addition to the nine accepted papers, two of the papers are nominated for awards of Best Paper and Best Student Paper. Below is a summary of all the submissions.
Nominated for Best Paper
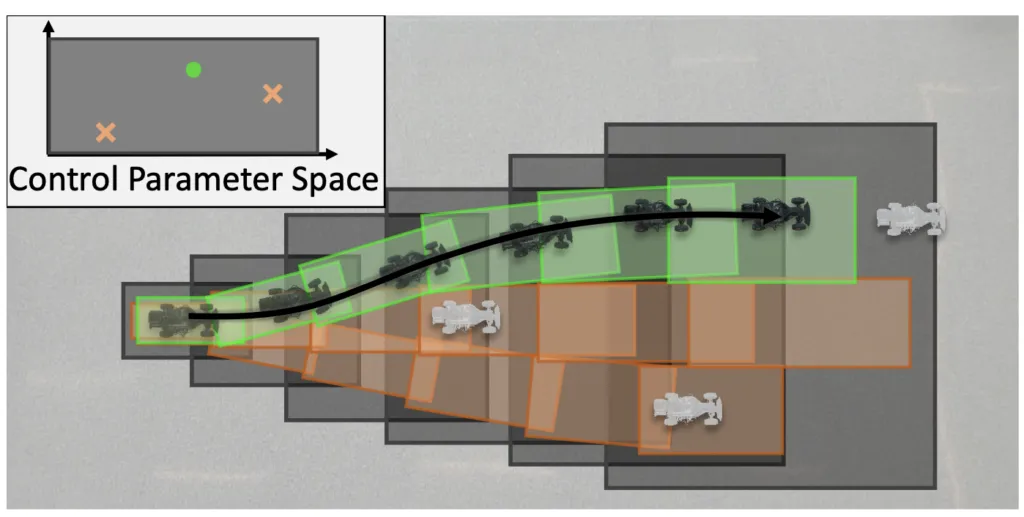
Convex Geometric Motion Planning on Lie Groups via Moment Relaxation
Sangli Teng, Ashkan Jasour, Ram Vasudevan, Maani Ghaffari
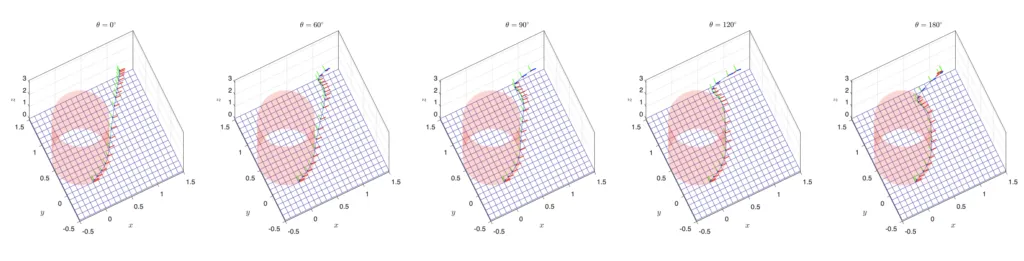
This paper reports a novel result: with proper robot models on matrix Lie groups, one can formulate the kinodynamic motion planning problem for rigid body systems as exact polynomial optimization problems that can be relaxed as semidefinite programming (SDP). Due to the nonlinear rigid body dynamics, the motion planning problem for rigid body systems is nonconvex. Existing global optimization-based methods do not properly deal with the configuration space of the 3D rigid body; thus, they do not scale well to long-horizon planning problems. We use Lie groups as the configuration space in our formulation and apply the variational integrator to formulate the forced rigid body systems as quadratic polynomials. Then we leverage Lasserre’s hierarchy to obtain the globally optimal solution via SDP. By constructing the motion planning problem in a sparse manner, the results show that the proposed algorithm has linear complexity with respect to the planning horizon. This paper demonstrates the proposed method can provide rank-one optimal solutions at relaxation order two for most of the testing cases of 1, 3D drone landing using the full dynamics model and 2, inverse kinematics for serial manipulators.
Nominated for Best Student Paper
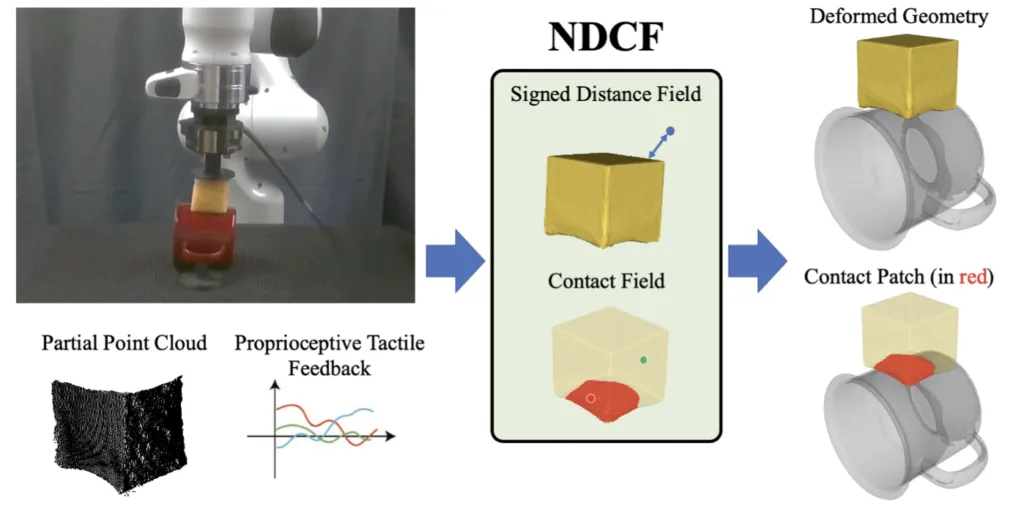
MultiSCOPE: Disambiguating In-Hand Object Poses with Proprioception and Tactile Feedback
Andrea Sipos, Nima Fazeli

In this paper, we propose a method for estimating in-hand object poses using proprioception and tactile feedback from a bimanual robotic system. Our method addresses the problem of reducing pose uncertainty through a sequence of frictional contact interactions between the grasped objects. As part of our method, we propose 1) a tool segmentation routine that facilitates contact location and object pose estimation, 2) a loss that allows reasoning over solution consistency between interactions, and 3) a loss to promote converging to object poses and contact locations that explain the external force-torque experienced by each arm. We demonstrate the efficacy of our method in a task-based demonstration both in simulation and on a real-world bimanual platform and show significant improvement in object pose estimation over single interactions.