News about Robot Perception & Computer Vision

New robotics research water tank to enable advanced marine autonomy
May 7, 2025
A new 10,000 gallon water tank at the University of Michigan will help researchers design, build, and test a variety of autonomous underwater systems that could help robots map lakes and oceans and conduct inspections of ships and bridges.
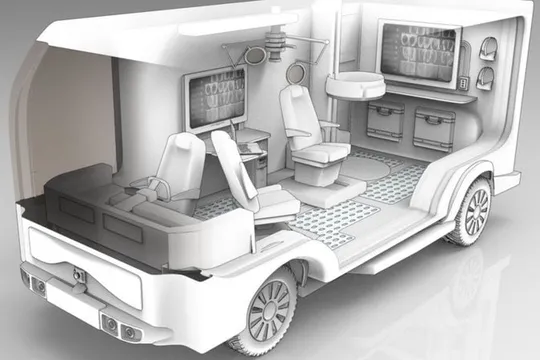
Bridging gaps in rural health care with AI-powered mobile clinics
February 12, 2025
General practitioners with AI help could make diagnoses, run and interpret tests, and perform procedures like specialists.
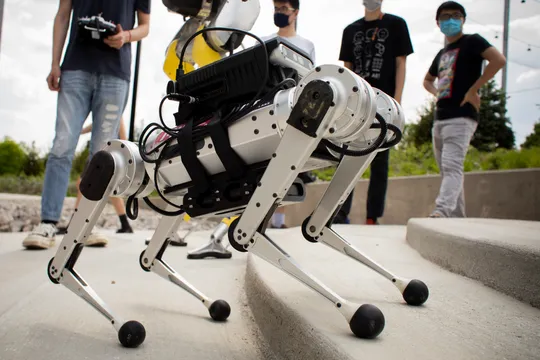
$1M for open-source first-responder robots
September 16, 2021
Tomorrow’s wildfire fighters and other first responders may tag-team with robotic assistants that can hike through wilderness areas and disaster zones, thanks to a University of Michigan research project.
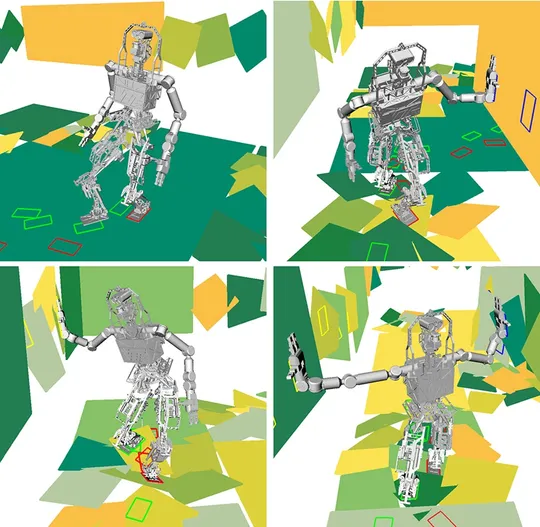
Rubble-roving robots use hands and feet to navigate treacherous terrain
August 13, 2021
A new way for robots to predict when they can’t trust their models, and to recover when they find that their model is unreliable.

Helping robots learn what they can and can’t do in new situations
May 19, 2021
To overcome this problem, University of Michigan researchers have created a way for robots to predict when they can’t trust their models, and to recover when they find that their model is unreliable.

Using computer vision to track social distancing
April 15, 2020
A University of Michigan startup is tracking social distancing behaviors in real time at some of the most visited places in the world.

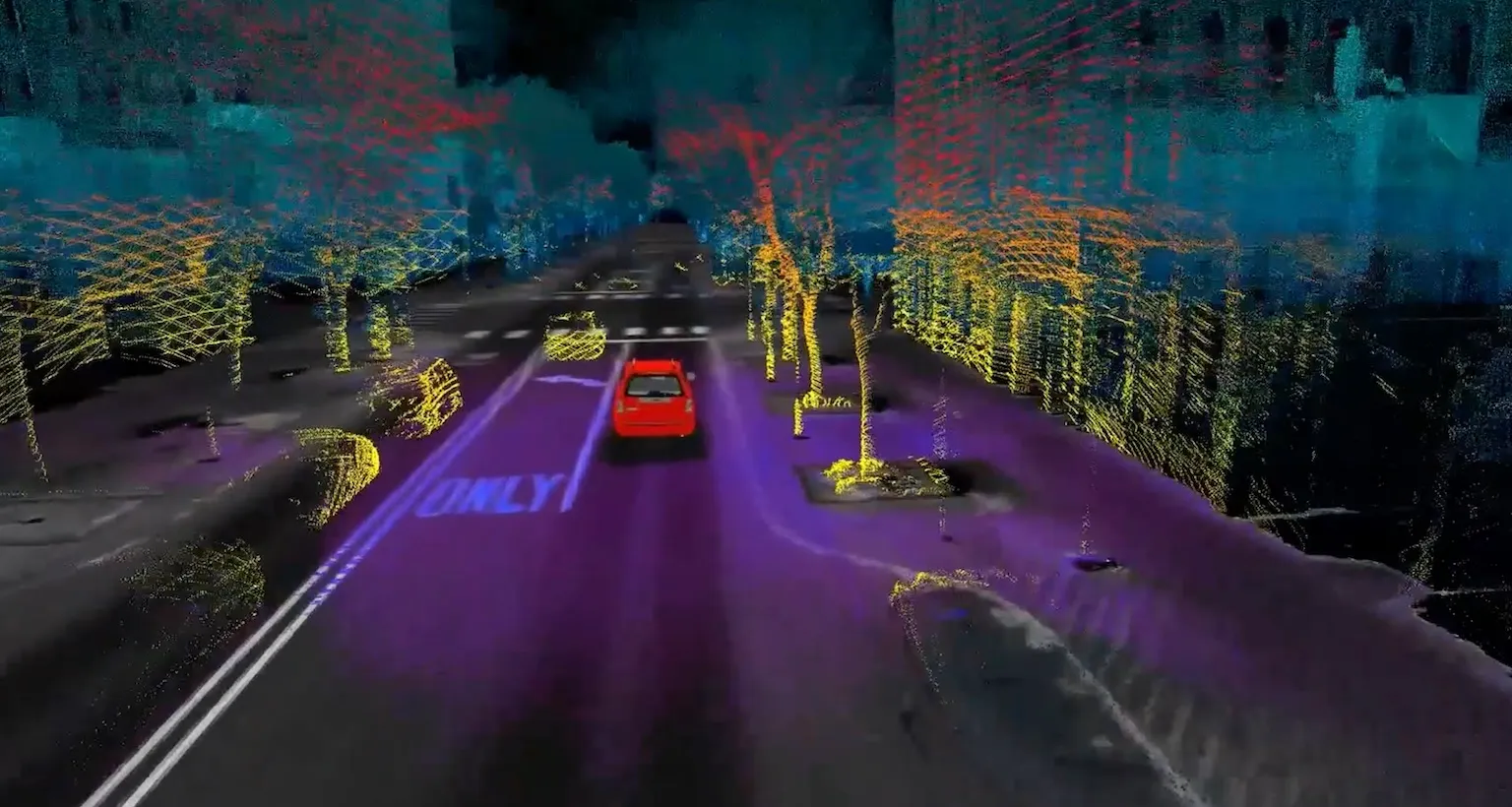
A quicker eye for robotics to help in our cluttered, human environments
May 23, 2019
A University of Michigan team has developed an algorithm that lets machines perceive their environments orders of magnitude faster than similar previous approaches.

Speaking like dolphins, a robot fleet takes on underwater tasks
December 17, 2018
A new generation of underwater robots are learning to communicate and collaborate in order to inspect boats, bridges, pipelines, and other underwater structures.