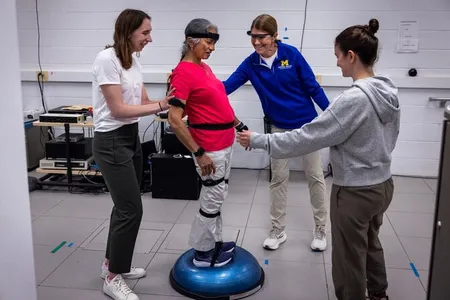
U-M is a national leader in designing, controlling, and evaluating robots and other devices that assist people with disabilities and enhance performance.
Few programs in the nation so effectively combine physical medicine and rehabilitation with robotics as Michigan. The work spans everything from basic research on one end of the spectrum to clinical trials on the other. Researchers use their understanding of the brain and nervous system to inform design. The ultimate goal is to help people overcome disabilities, heal faster, and live better lives.
For wearable robotic devices, U-M researchers seek motors that offer the most power for the lightest weight. They also have developed portable rehabilitative devices that operate with passive elements such as brakes and dampers that dissipate energy provided by the user. One such device is U-M’s SepaRRo — Semi-Passive Rehabilitation Robot. SepaRRo weighs just a fraction of its commercial counterparts by taking advantage of controllable brakes instead of motors to guide or resist the user’s intended motion.
Another passive system invented at Michigan is a variable-stiffness, ankle-foot prosthesis. Users can change the stiffness of the prosthesis with a smartphone application with every step they take, as needed.
Researchers also use signals from the peripheral nerve that connects the brain to a prosthetic hand using a surgical approach pioneered at Michigan Medicine.
Michigan engineers have shown that a powered prosthetic leg offers better performance for users than a passive prosthetic, and even improved upon a commercially available prosthetic leg’s control software.
Available now to the scientific community is the Open Source Leg: an open-source, artificially intelligent prosthetic leg designed by researchers at U-M and the Shirley Ryan AbilityLab in Chicago. The leg’s free-to-copy design and programming aim to improve the quality of life of patients and accelerate scientific advances by offering a unified platform for fragmented research efforts across the bionics field.
Reverse engineering how the human body behaves is the approach to wearable robotics pursued at Michigan. This effort involves working from a set of analyses and technical tools developed to study the mechanics of a healthy body to build blueprints for wearable robotics systems. The robotic systems thus provide insights into the basic science of human biomechanics and vice versa.